Основная цель внедрения системы – это обеспечение оптимального использования складов, на которых работают перегрузочная техника, с большим числом ситуаций параллельной и одновременной работы. Тем самым уменьшив время простоя машин.
Перед внедрением системы противостолкновения выполняются математические расчеты рабочих диапазонов и моделируются возможные варианты оптимизации работы оборудования. Пример на рис. 1 и 2.
Рис. 1
Схематичное изображение машин

Рис. 2
Схематичное изображение рабочих диапазонов

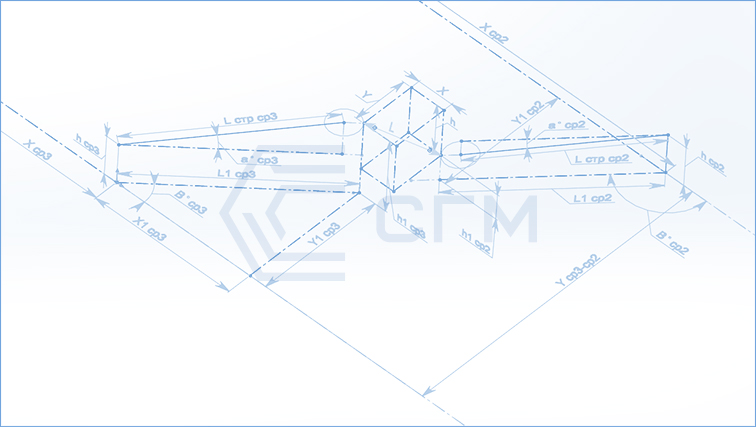
Изменить математическую модель расчета безопасного расстояния до столкновения машин с существующей 2-х координатной модели на 3-х координатную, на основании расчета расстояния концов стрел каждой из машин друг относительно друга на основании уже установленных датчиков абсолютных значений (энкодеров) на каждой из машин (датчик портального механизма перемещения, датчик поворота стрелы, датчик подъема стрелы), которые обеспечивают очень высокую точность измерения.
Пример математической модели, позволяющей определять расстояние между оконечностями стрел по энкодерам, приведен ниже.
Рис. 3
Пример математической модели вычислений по 3-м координатам
Возможно дополнительно установить на машины вдоль стрелы, по обеим сторонам, бесконтактные датчики радарного типа, для контроля приближения к посторонним объектам и соседним машинам, которые будут работать в режиме реального времени и в условиях запыленности.
Сигналы с устанавливаемых датчики радарного типа, предлагается запрограммировать в существующей управляющей программе PLC машины и выводить в составе alarm-ов и на мнемосхемы панелей операторов машин при пересечении луча, что обезопасит стрелу от столкновения с посторонними объектами на всем ее протяжении и продублирует контур безопасности, основанный на математическом вычислении по 3-м координатам на основании энкодеров.
Рис. 4
ПРОИЗВОДСТВО /